

 14.0%OFF
14.0%OFF

Download App
| >> | LShop | >> | Book | >> | Mathematics & Scienc... | >> | Biology, Life Scienc... | >> | Haptics For Teleoper... |
14.0%OFF
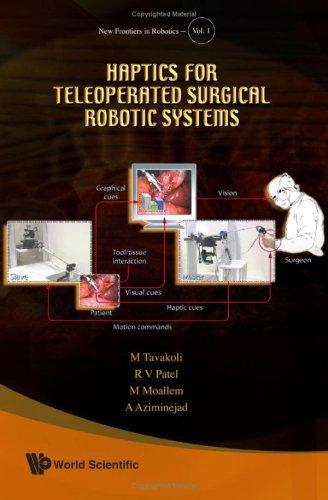
Haptics For Teleoperated Surgical Robotic Systems (New Frontiers in Robotics)

-
ISBN
:
9789812813152
-
Publisher
:
World Scientific Publishing Company
-
Subject
:
Biology, Life Sciences, Technology, Engineering, Agriculture, Education
-
Binding
:
HARDCOVER
-
Pages
:
180
-
Year
:
2008
₹
11089.0
 14.0% OFF
14.0% OFF
₹
9536.0
 9536.0
9536.0
Buy Now


Shipping charges are applicable for books below Rs. 101.0
View Details(Imported Edition) Estimated Shipping Time : 20-23 Business Days
View Details

-
Description
An important obstacle in Minimally Invasive Surgery (MIS) is the significant degradation of haptic feedback (sensation of touch) to the surgeon about surgical instrument s interaction with tissue. This monograph is concerned with devices and methods required for incorporating haptic feedback in master-slave robotic MIS systems. In terms of devices, novel mechanisms are designed including a surgical end-effector (slave) with full force sensing capabilities and a surgeon-robot interface (master) with full force feedback capabilities. Using the master-slave system, various haptic teleoperation control schemes are compared in terms of stability and performance, and passivity-based time delay compensation for haptic teleoperation over a long distance is investigated. The monograph also compares haptic feedback with visual feedback and with substitution for haptic feedback by other sensory cues in terms of surgical task performance. Contents: Introduction; Sensorized Surgical Effector (Slave); Haptic User Interface (Master); Unilateral Teleoperation Control; Bilateral Teleoperation Control; Substitution for Haptic Feedback: Bilateral Teleoperation Control Under Time Delay.
Related Items
-
of
-
OFFER
Digital Filters : Analysis, Design And Applications
Andreas Antoniou

Starts At
 487.0
487.0
625.0
22% OFF